2020.6.21
NX13の製作
アジェンダ
1. 概要
2. 構成
3. M5Atomについて
4. Fusion360での設計
5. 組み立て
6. macOS用コントロールアプリ
7. Blynkでコントロール
8. スケッチ
9. 動作確認
1. 概要
M5Stackシリーズで最小のM5AtomシリーズのM5Atom Matrixで二足歩行ロボットを作りました。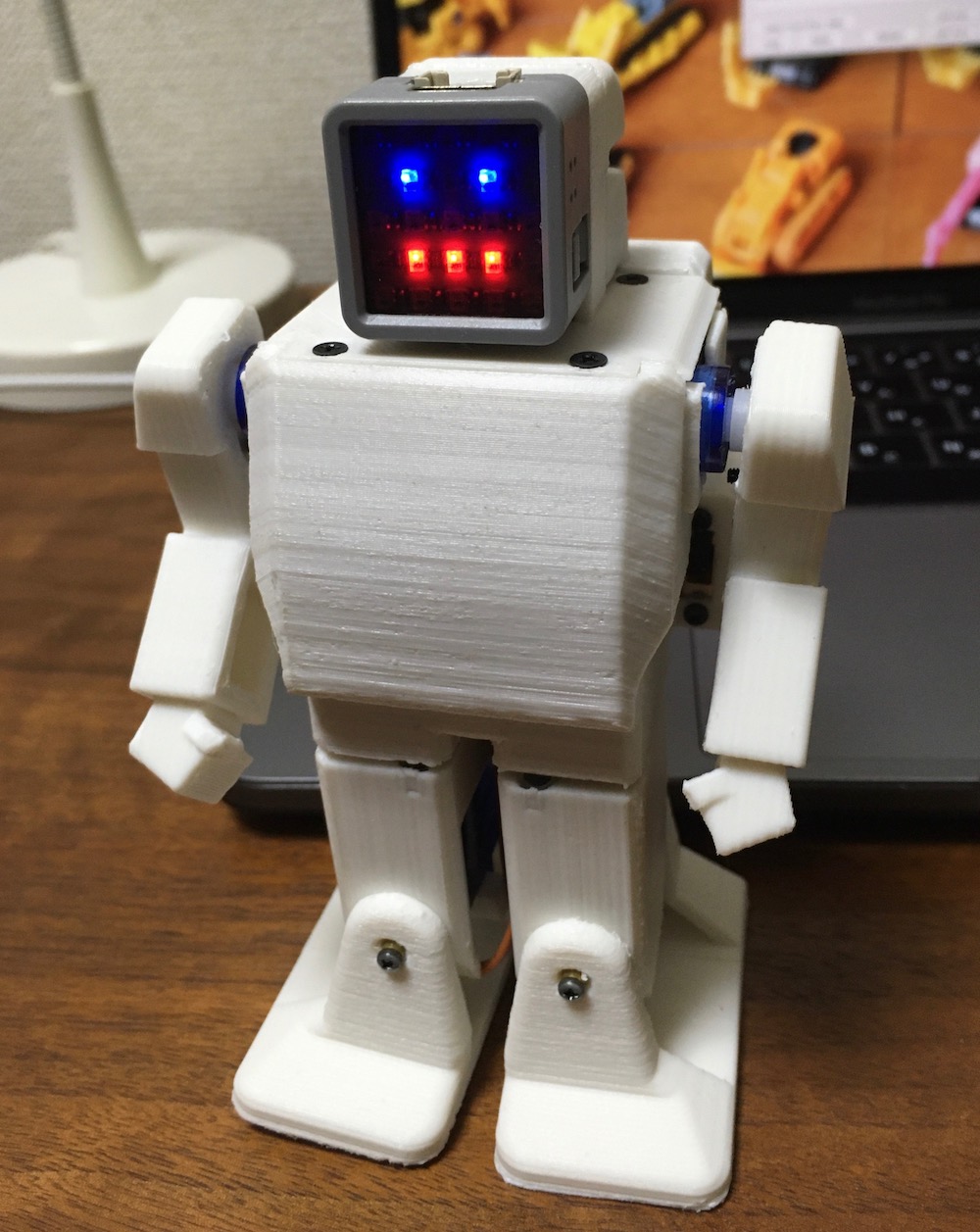
2. 構成
1)M5Atom
2)サーボ FITEC FS90 x6
3)電池 単5x3
結線は以下のようにしています。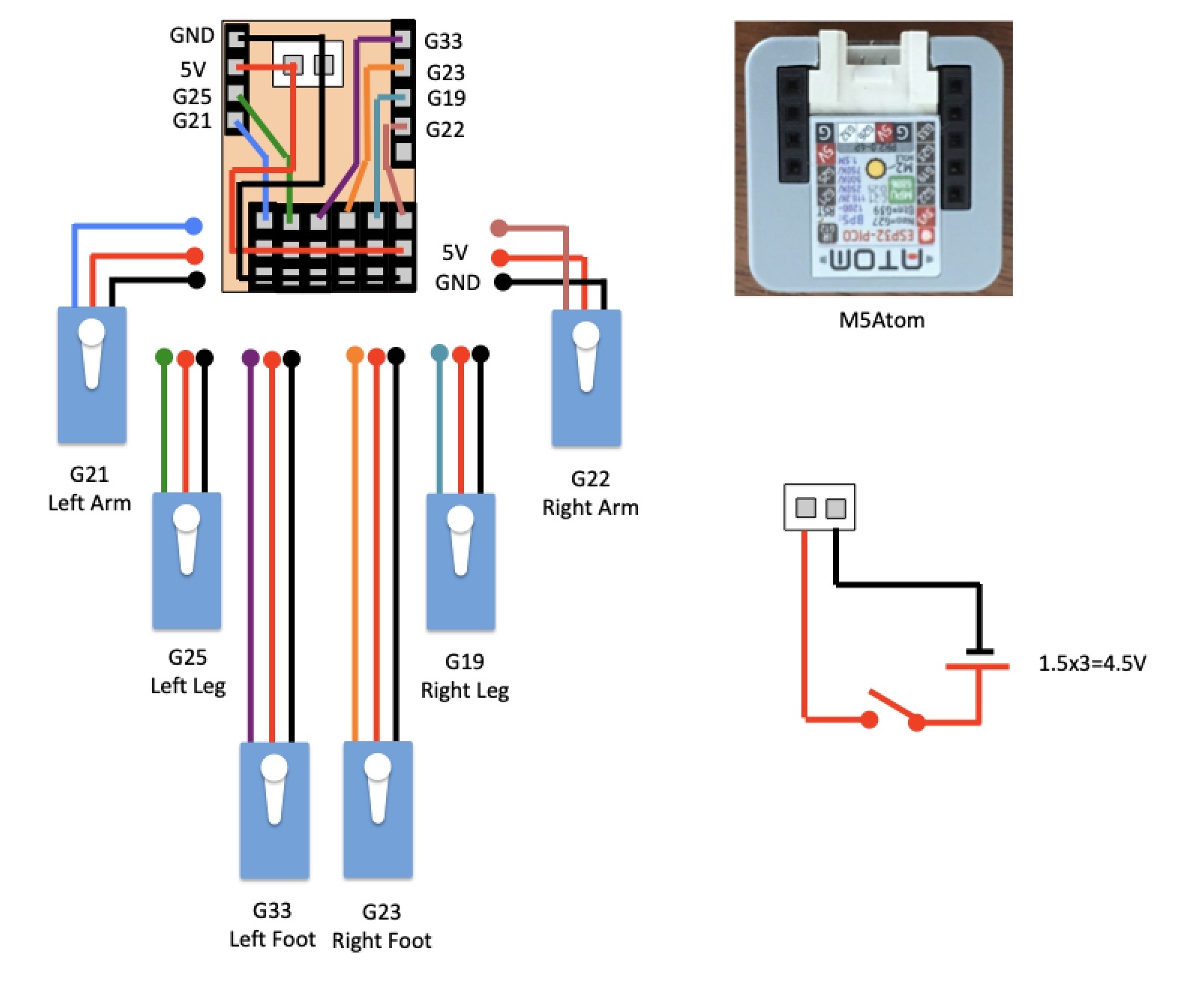
3. M5Atomについて
M5Atomについてはブログの方で書きましたので、こちらを参照してください。
4.Fusion360での設計
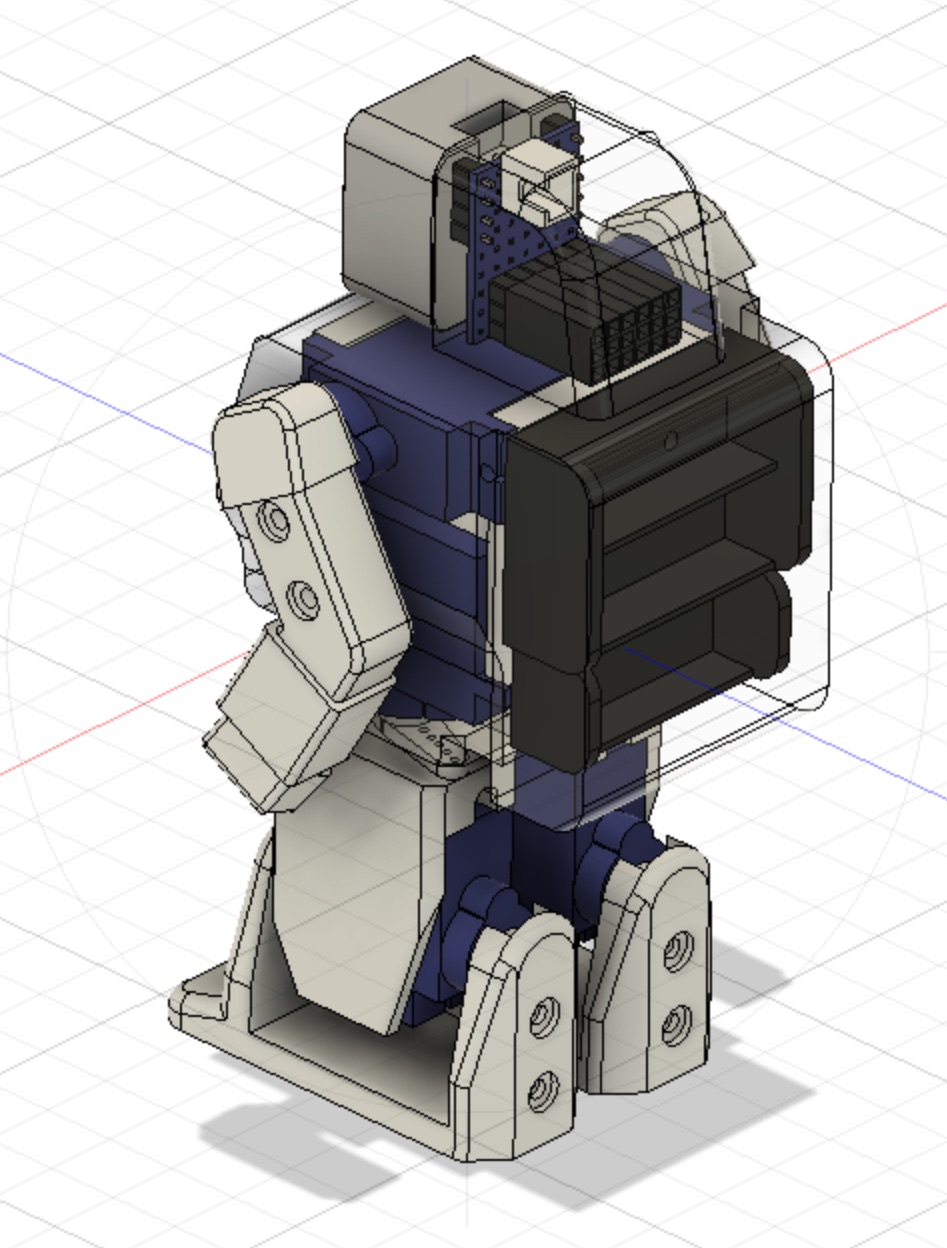
構造の設計はFusion360を使用しました。


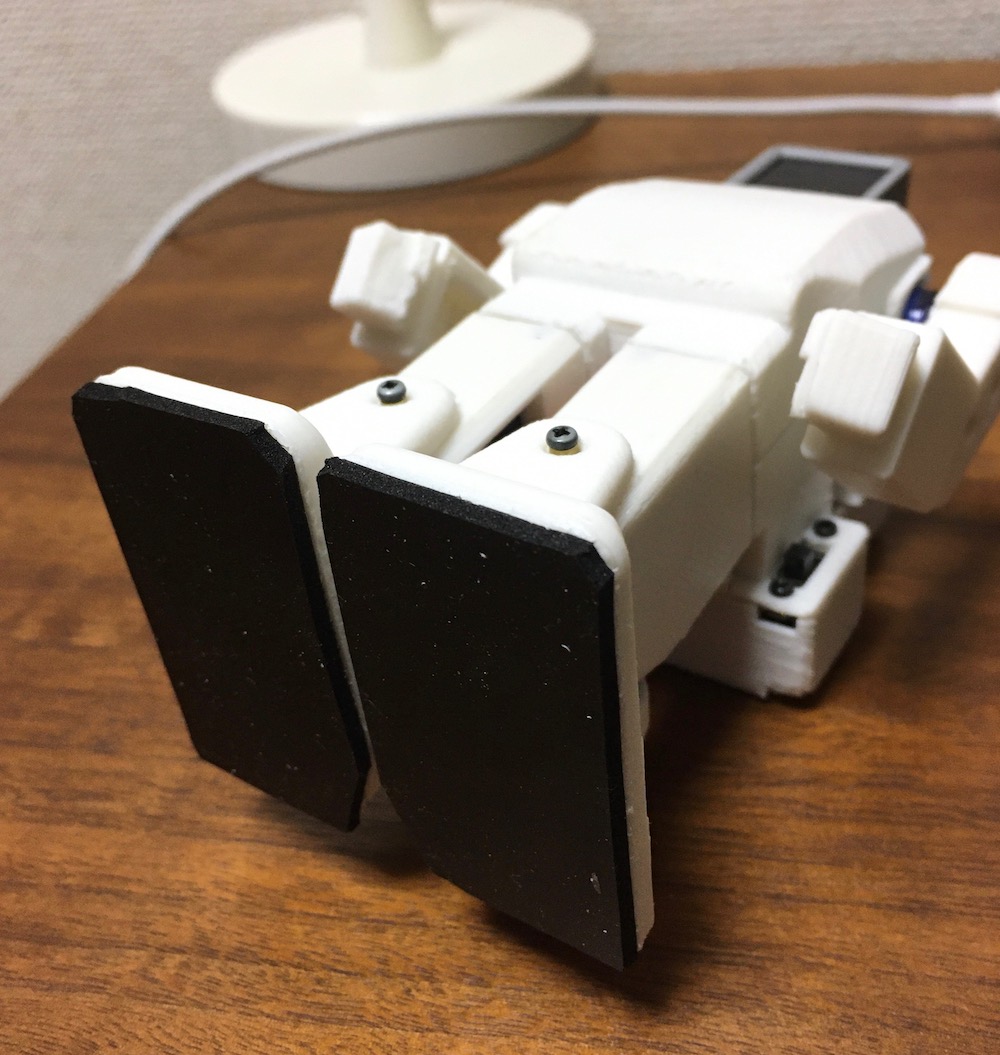
5.組み立
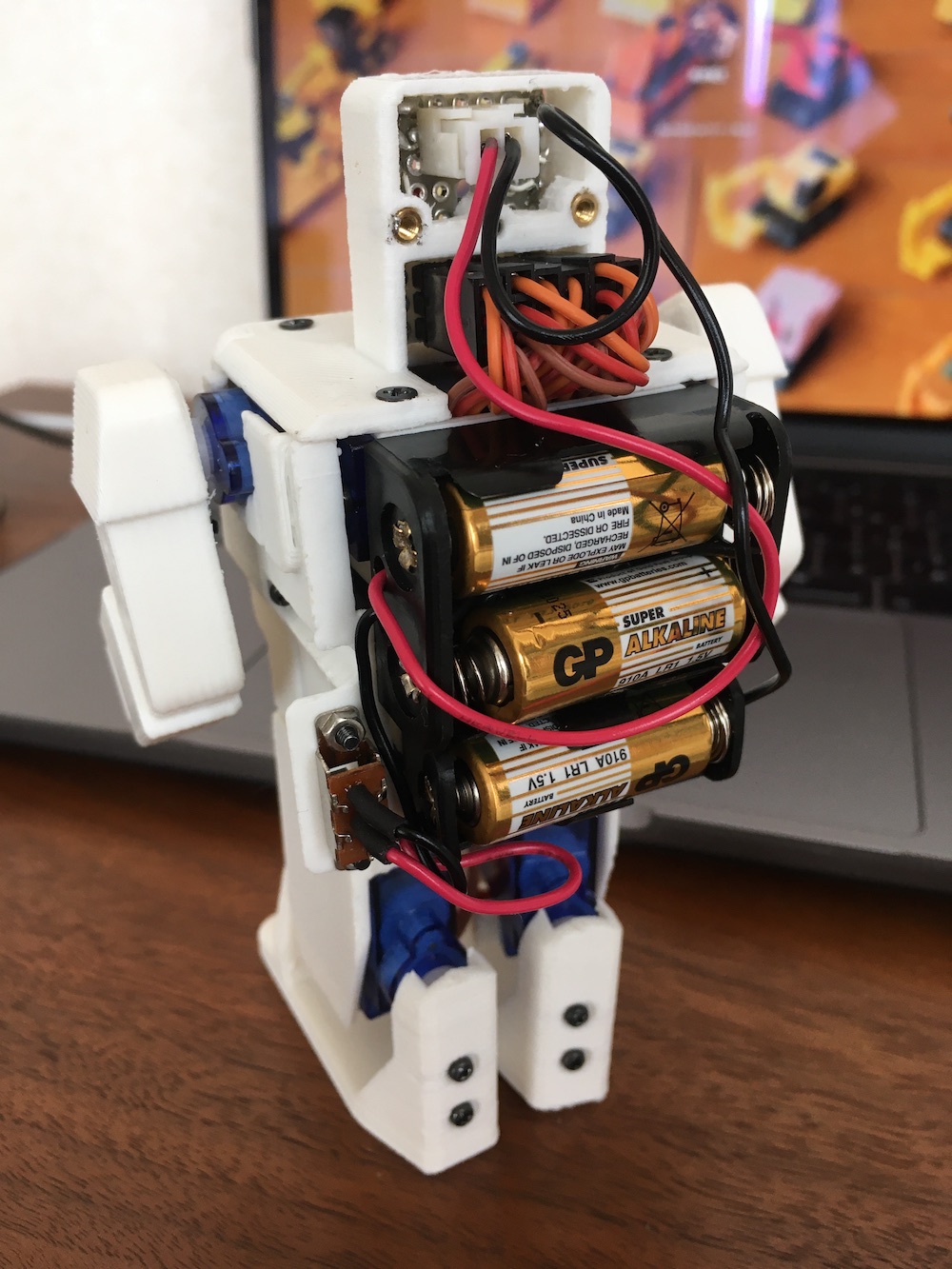
組み立てではサーボのケーブルを押し込めるのに苦労しました。
足の裏には滑り止めでゴムを貼り付けています。

5.macOS用コントロールアプリ
今回モーションの作成は自作のmacOSアプリで行いました。

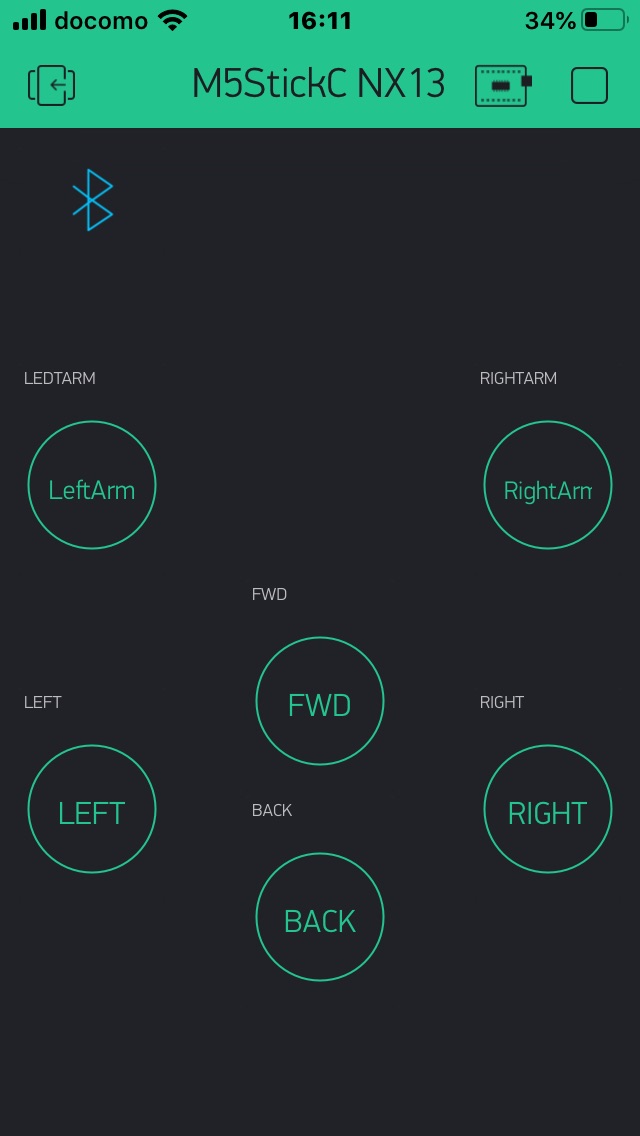
6.Blynkでコントロール
今回コントロールはBlynkというiPhoneアプリを使用しています。
Blynkについてはブログに書いたので参考してください。
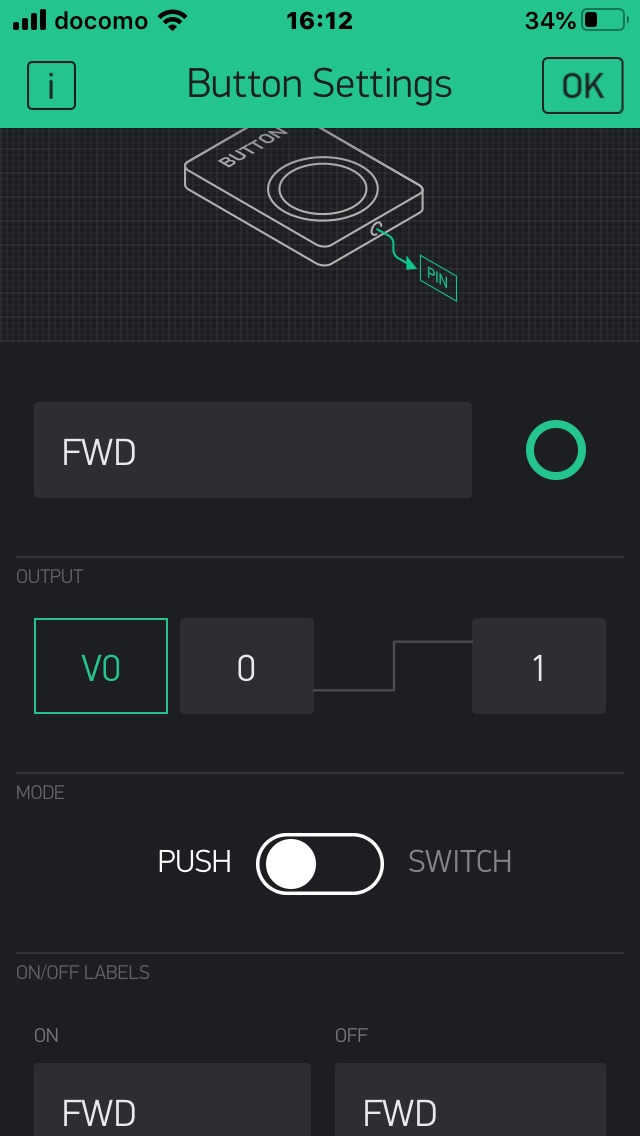
Blynkでは6つのボタンを使用しています。
7.スケッチ
詳細のスケッチはブログに書きましたのでそちらを参照してください。
モーション作成用スケッチ
Blynk用スケッチ
8.動作確認
Blynkの操作に合わせて前後歩行、左右歩行、左右の手の上げ下げが出来ます
更新履歴
- 2020.6.21NX13 M5Atomで作る二足歩行ロボットの製作のページを作成。NEW