2022.7.8
NX18の製作
アジェンダ
1. 概要
2. 構成
3. M5Atomについて
4. Fusion360での設計
5. 組み立て
6. macOS用コントロールアプリ
7. Dabbleでコントロール
8. スケッチ
9. 動作確認
1. 概要
M5Stackシリーズで最小のM5AtomシリーズのM5Atom Matrixで逆関節二足歩行ロボットを作りました。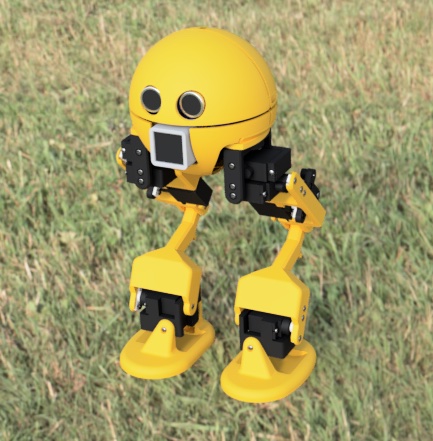

2. 構成
1)M5Atom Matrix
2)サーボ TowerPro MG90D x6
3)電池 リチウムイオン16340(保護回路付き)x13
4)PCA9685サーボドライバ基板
5)DCDC基板 LXDC55
6)超音波距離センサ HC-SR04
結線は以下のようにしています。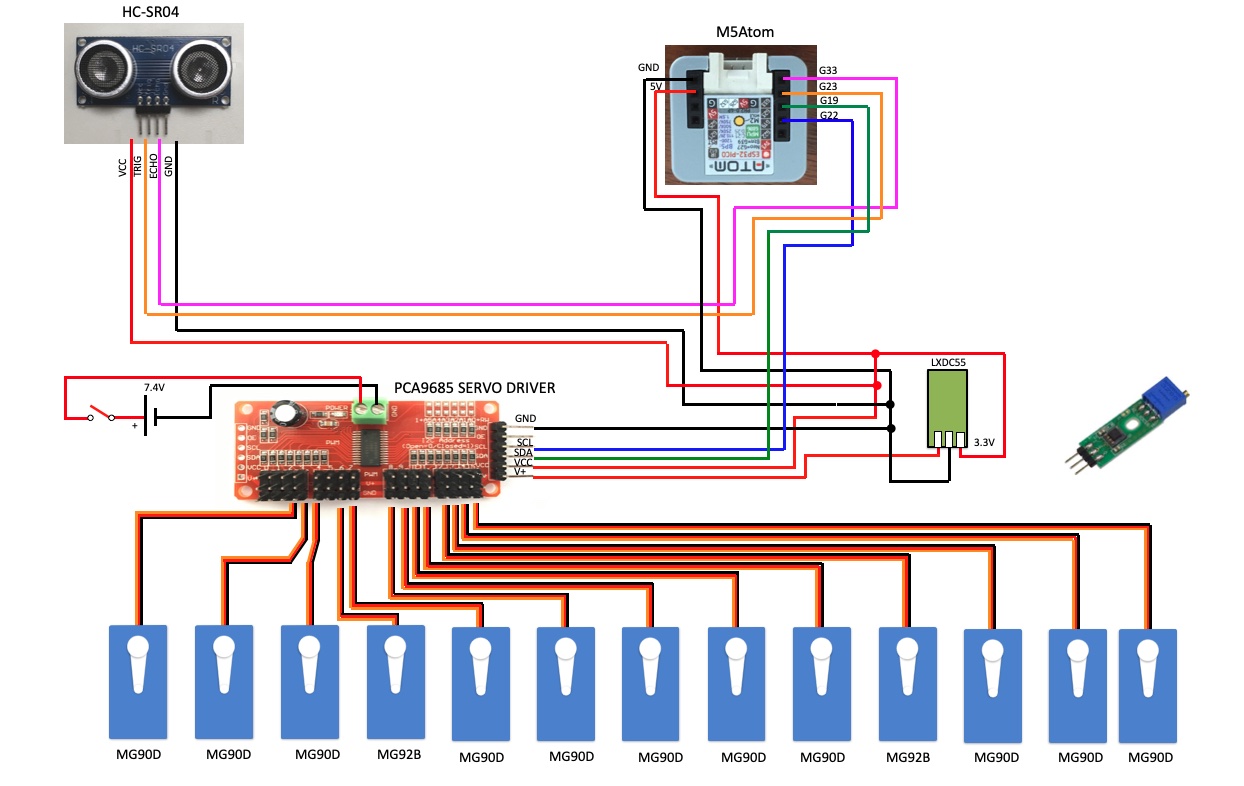
3. M5Atomについて
M5Atomについてはブログの方で書きましたので、こちらを参照してください。
4.Fusion360での設計
構造の設計はFusion360を使用しました。

また、3Dプリント部品のためのSTLをGitHubに置きましたので参考にしてください
3Dプリント部品用STL Github
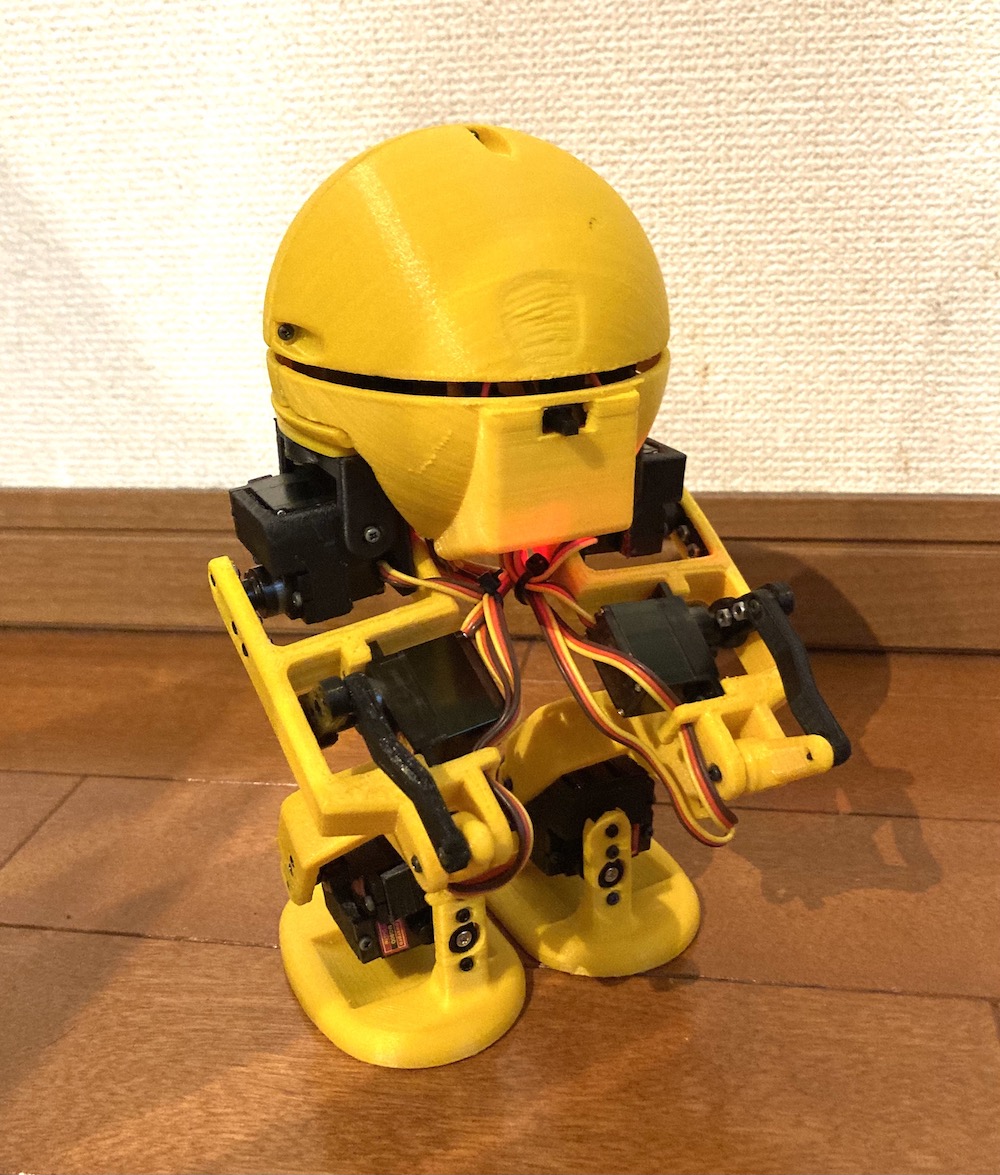
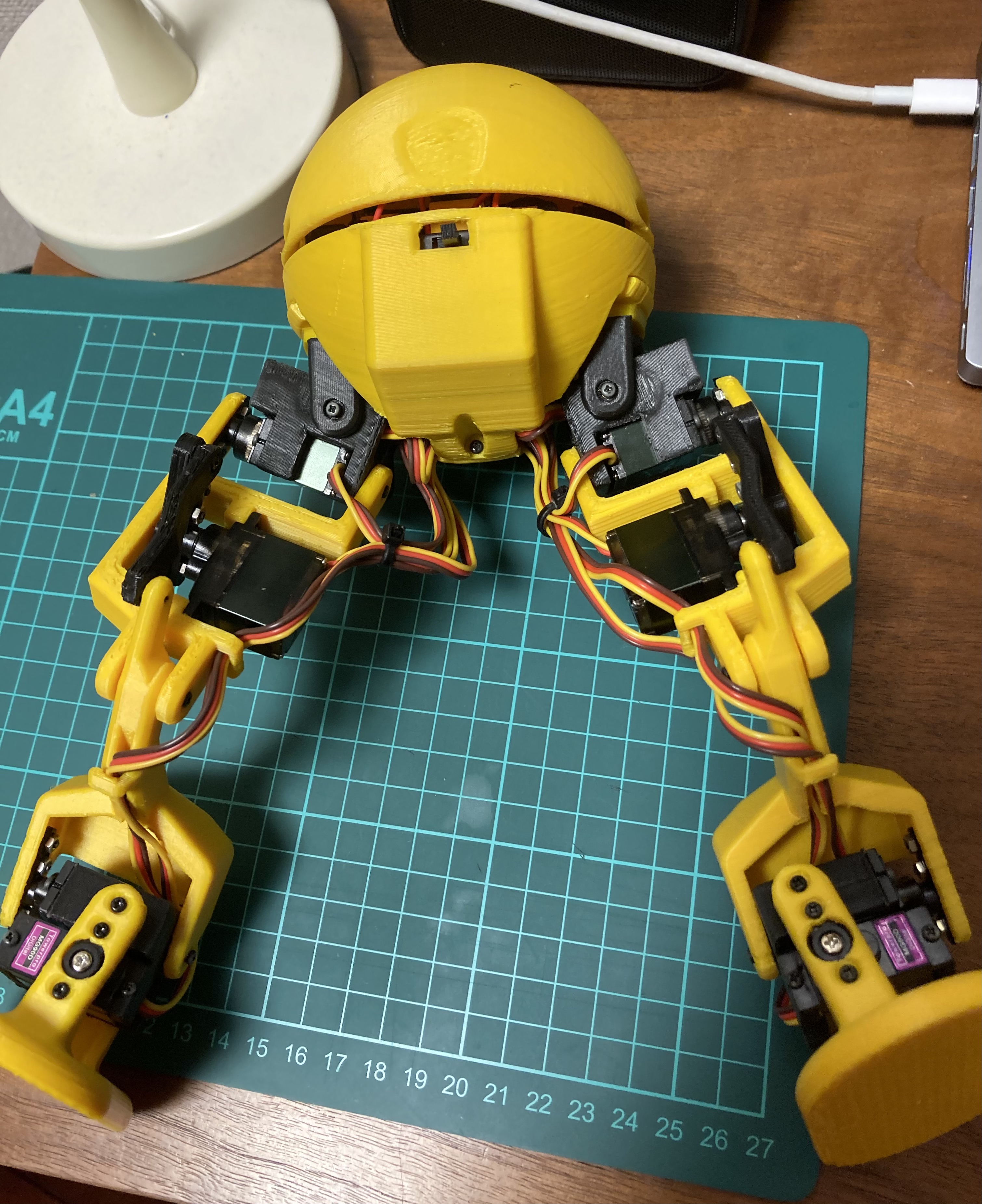
5.組み立
中身はこのように頑張って押し込めました。



サーボのケーブルはカットして束ねています。
5.macOS用コントロールアプリ
今回モーションの作成は自作のmacOSアプリで行いました。


6.Dabbleでコントロール
今回コントロールはDabbleというiPhoneアプリを使用しています。
Dabbleについてはブログに書いたので参考してください。

7.スケッチ
詳細のスケッチはGithubに書きましたのでそちらを参照してください。
歩行モーションスケッチ Github
8.動作確認
Dabbleで操作操作して前後歩行、左右歩行、左右の首振りが出来ます
前後、左右、斜め、左右ターンを連続で動作できます
超音波距離センサで障害物を避ける動作を追加
M5AtomのIMUを使って重心位置を移動
更新履歴
- 2022.8.27動画を追加NEW
- 2022.7.8NX18 M5Atomで作る逆関節二足歩行ロボットの製作のページを作成。